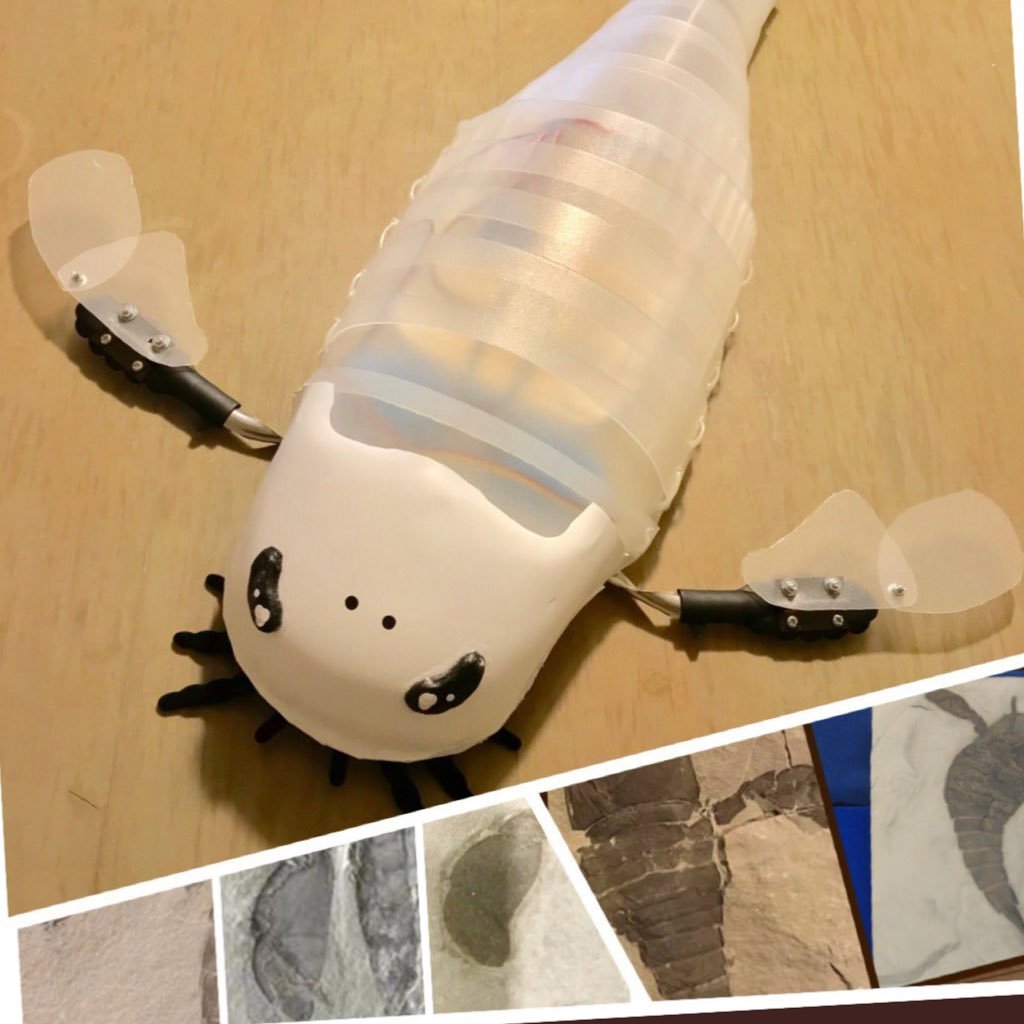
Robokaseki 化石をロボットにして泳がせる。⭐︎AFK研究所(同)⭐︎チームロボ化石!
@robokaseki
6,511
Followers
2,580
Following
3,171
Media
14,944
Statuses
We are attempting to reproduce an ancient creatures living in water as educational robots .AFK R&D LTD.古生物をロボ化石で簡易再現。(社会貢献活動) イラスト提供3D協力よ志アナゴ( @Yoshi_Gardeneel )
ネット空間および、東京及びその周辺が多いです。
Joined December 2009
Don't wanna be here?
Send us removal request.