Wenxuan Zhou
@Wenxuan_Zhou
1,749
Followers
265
Following
14
Media
55
Statuses
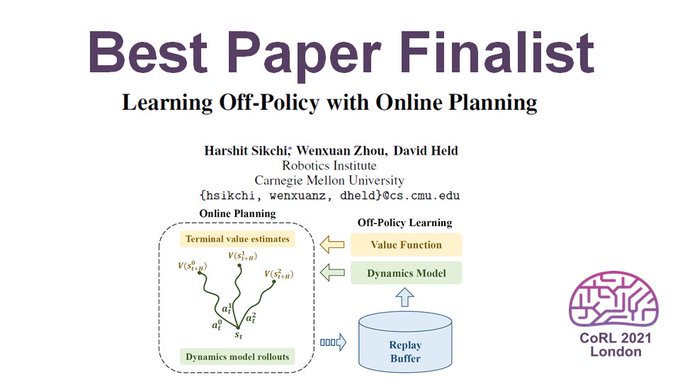
Research Scientist at @Meta GenAI; Ph.D. in Robotics @CarnegieMellon ; Former Research intern at Google @DeepMind
Joined October 2015
Don't wanna be here?
Send us removal request.