Stanford Vision and Learning Lab
@StanfordSVL
15,018
Followers
148
Following
13
Media
346
Statuses
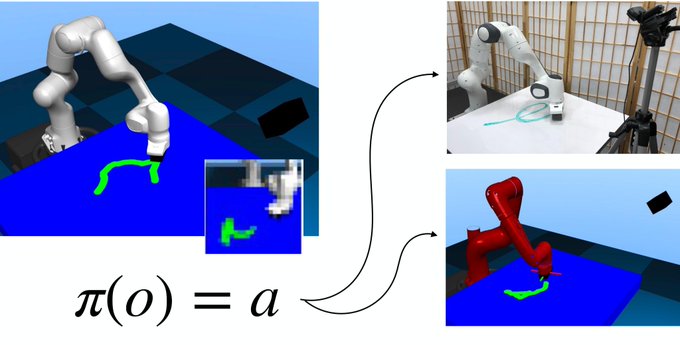
SVL is led by @drfeifei @silviocinguetta @jcniebles @jiajunwu_cs and works on machine learning, computer vision, robotics and language
Don't wanna be here?
Send us removal request.